
产品详情
简单介绍:
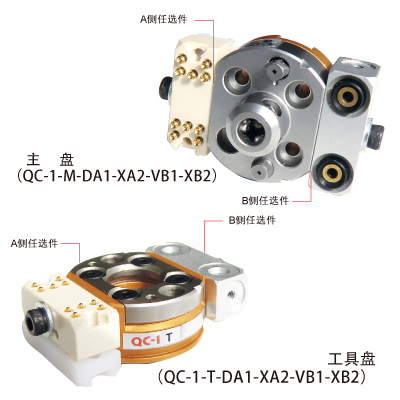
日本BL快换器主盘工具盘QC-1-M-DA1-XA2-VB1-XB2
详情介绍:

-
可搬运重量1kg(9.8N)
-
-

-

-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
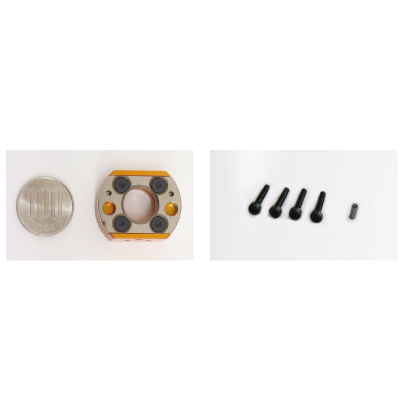
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
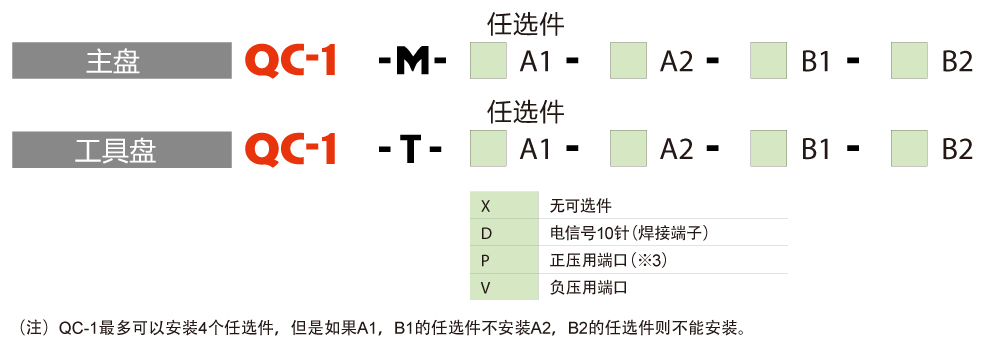
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
-
可搬运重量1kg(9.8N)
-
-
-
-
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
-
产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
本体
可搬运重量(额向定负荷)
9.8N (1kg)
位置再现精度※1
±0.015 mm
动态允许
扭矩
弯矩方向(Tx.Ty)
4 N・m(40.8 kgf・cm)
扭转方向(Tz)
16.6 N・m(169.4 kgf・cm)
锁紧力(气压0.49MPa) ※2
185N
材质
框架
铝合金
分合机构部
不锈钢
外形尺寸(锁紧时)
φ32xH29mm
产品重量
(本体部)
主盘
60g
工具盘
30g
分合机构部
钢球式锁紧方式
分合动作气压
0.39~0.68MPa (4~7kgf/cm2)
容许温度・湿度范围
0~50℃、35~90% (无结露现象)
※2 锁紧力为用于实现重新定位精度的力,在供给用于实现脱落操作的气体或发生破损前一直保持锁紧。
任选件
D
电信号模块
3A×10针 (焊接端子)
P
正气压用气压端口※3
M3×2针
V
负气压用气压端口
M3×2针
※3 安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。
- 可搬运重量1kg(9.8N)
精密电子机器・精密机械部品的组装、医药品・食品领域的搬运为中心的轻型高速搬运机器人的末端自动交换装置。
主盘添附品
・内六角螺丝(M3×15)×4
・阶段平行销×1
- 产品资料(PDF)
QC-1的特点
可与法纳克公司的拳头型机器人直接安装
在机器人侧和终端工具侧因为采用法纳克公司的【拳头型机器人1号M-li A】(4轴/6轴)的法兰盘(PCD20),可以直接与该款机器人安装。
也可后续安装到机器人上。
无接触式吸合方式
进行结合动作时,主盘和工具盘无需接触,通过芯滑动进行吸合。
机械式故障保险机构
采用了本公司自主开发的机械故障保险机构设计,即使【结合】
气压停止供应,主盘和工具盘也不会分离。
主要规格
| 本体 | ||
|---|---|---|
| 可搬运重量(额向定负荷) | 9.8N (1kg) | |
| 位置再现精度※1 | ±0.015 mm | |
|
动态允许 扭矩 |
弯矩方向(Tx.Ty) | 4 N・m(40.8 kgf・cm) |
| 扭转方向(Tz) | 16.6 N・m(169.4 kgf・cm) | |
| 锁紧力(气压0.49MPa) ※2 | 185N | |
| 材质 | 框架 | 铝合金 |
| 分合机构部 | 不锈钢 | |
| 外形尺寸(锁紧时) | φ32xH29mm | |
|
产品重量 (本体部) |
主盘 | 60g |
| 工具盘 | 30g | |
| 分合机构部 | 钢球式锁紧方式 | |
| 分合动作气压 | 0.39~0.68MPa (4~7kgf/cm2) | |
| 容许温度・湿度范围 | 0~50℃、35~90% (无结露现象) | |
| 任选件 | ||
|---|---|---|
| D | 电信号模块 | 3A×10针 (焊接端子) |
| P | 正气压用气压端口※3 | M3×2针 |
| V | 负气压用气压端口 | M3×2针 |
型番表示方法
※3安装了正压用孔4个 (M3×8个)时、 请向本公司询问。